
RFID复习(七):碰撞与防碰撞
ALOHA防碰撞算法
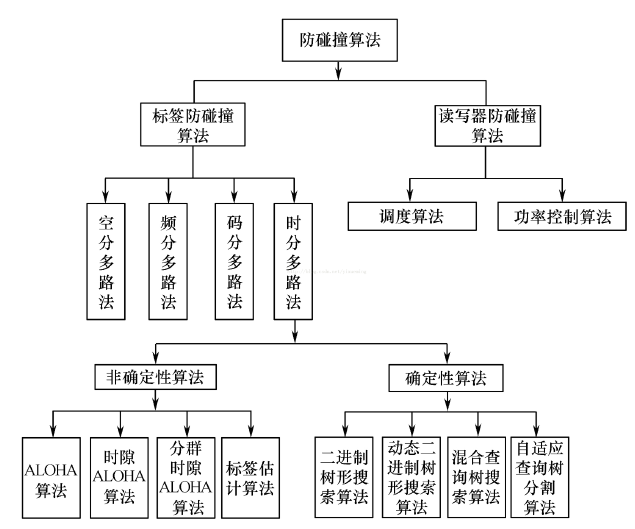
算法性能分析指标
- 吞吐量S,又称为吞吐率。它等于在帧的发送时间T0内成功发送的平均帧数。取值范围在0到1之间,越靠近1代表信道利用率越充分。
- 网络负载G:在T0内共发送的平均帧数。包括发送成功的帧和因碰撞未发送成功而重传的帧。,只有在不发生碰撞时,G=S。
- 在稳定状态下,吞吐量S与网络负载G的关系为S=G∙P(发送成功)
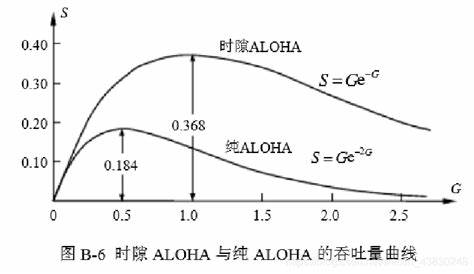
纯ALOHA算法
各个电子标签待命时间片段长度是随机的,再次向读写器发送信号的时间也不相同,这样减少碰撞的可能性。
当标签被识别后,就会一一进入到休眠状态,直到读写器识别出所有在其工作区内的标签后,算法过程才结束。
网络负载G一定不能超过0.5
时隙ALOHA算法
每个时隙⻓度要⼤于标签回复的数据⻓度;标签只能在每个时隙的开始处发送数据。
对于时隙ALOHA,不稳定区域位于G>1的部分。
帧时隙ALOHA算法
特点:
- 把N个时隙打包成⼀帧;
- 标签在每N个时隙中只随机发送⼀次信息;
- 需要阅读器和标签之间的同步操作,每个时隙需要阅读器进⾏同步。
当帧的长度等于阅读器场内标签数目时,才能获得最佳的识别性。
动态帧时隙ALOHA算法
根据标签动态变化的数量动态调整帧长
总结
- 纯ALOHA算法只适⽤于只读系统,且是⼀种“标签先讲”的⽅式。
- 时隙ALOHA是⼀种“阅读器先讲”的通信⽅式。要求标签有随机数发⽣器,这样标签才会在随机的⼀个时隙⾥发送数据。
- 帧时隙ALOHA算法中的帧是由阅读器定义的⼀段时间⻓度,其中包含若⼲个时隙,电⼦标签在每个帧内随机选择⼀个时隙发送数据。
- 动态时隙ALOHA算法是⽬前RFID标准中所实际采⽤的。根据实际系统中接⼊RFID标签个数动态调整系统的时隙⼤⼩。
二进制搜索
如果两个或多个电子标签同时发送的数位有不同值,则接收的上升沿和下降沿互相抵消,“没有变化”的状态是不允许的,将作为错误被识别。用这种方法可以按位追溯跟踪冲突的出现。
所以二进制搜索算法要选用曼彻斯特编码。
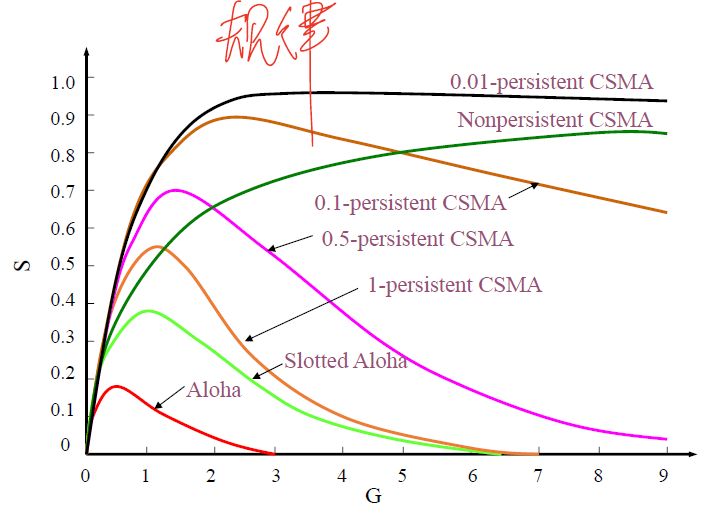
阅读器防碰撞:载波监听
不同载波监听策略的CSMA技术:
- 非坚持CSMA:一旦监听到信道忙就不再坚持听下去,延迟一段随机时间后再重新监听。(信道利用率不高)
- 1-坚持CSMA:监听到信道忙时仍然坚持听下去,直到空闲为止。一旦信道空闲就发送。如有冲突,等待一随机时间后再监听。(冲突较大)
- P-坚持CSMA:监听到信道忙时仍然坚持听下去,直到空闲为止。当听到信道空闲时,以概率P发送数据。(P=1时,即为1坚持)
- 概率P的选择:假设有N 个节点的数据包需要发送,保证NP < 1以避免冲突
- 性能: CSMA > 时隙 ALOHA > 纯 ALOHA
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 STARBO's BLOG!
相关推荐

评论